#1 3D Deep Learning For Remote Sensing (full day)
Abstract:
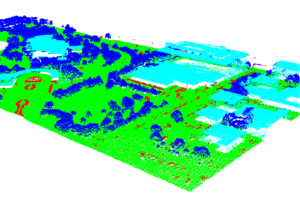
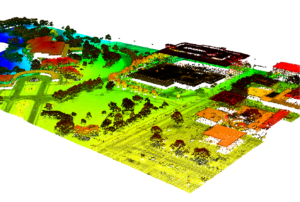
This tutorial presents an overview of the recent developments in neural network architecture for the semantic segmentation of 3D point clouds. We will present the different competing paradigms making up the state-of-the-art of this fast-evolving field, such as image-based, voxel-based, convolution-based, set-based, and graph-based methods. We then present some strategies for scaling up the algorithms to the scale typical of remote-sensing applications, such as the SuperPoint Graph approach.
The lecture will be completed by a practical exercise in which the participant will follow a complete guided implementation of the PointNet network for semantic segmentation of aerial point clouds.